




مروری بر کنترل واحد هواساز در سیستم تهویه مطبوع:
استراتژی های کنترل بهینه، کنترل مقاوم و کنترل مدل پیش بین
فریبا بوذری لیاوُلی
مدرس گروه مهندسی برق، دانشکده مهندسی برق، دانشگاه دانش البرز، قزوین، ایران
چکیده
اهمیت سیستمهای سرمایش، گرمایش و تهویه مطبوع به دلیل ارتباط نزدیک با بهینه سازی انرژی، مسائل زیست محیطی، اقتصادی و فناوری، موضوعی بسیار چالش برانگیز در صنعت می باشد. مدلسازی این سیستم ها، با توجه به مصرف برق، فرآیند حرارتی داخل ساختمان و تجهیزات تهویه مطبوع شامل چیلرهای تراکمی آب خنک، چیلرهای تراکمی هوا خنک، مینی چیلرها، کندانسینگ یونیت ها، هواساز، ایرواشرها، فن کوئل ها، کولرهای گازی طراحی و انتخاب می گردد. تاکنون، بسیاری از استراتژی های کنترلی برای انواع این مدل ها با اهداف گوناگون مانند کنترل دما، کنترل رطوبت و تامین برودت کافی پیاده سازی و اجرا شده است. این مقاله به مرور استراتژی های کنترلی می پردازد که در چند سال اخیر در مقالات علمی مهندسی برق، مکانیک و انرژی در حوزه تهویه مطبوع بر روی سیستم هواساز مورد توجه بسیاری واقع شده است. این مقالات شبیه سازی شده، رویکردهای کنترلی مبتنی بر روش های بهینه سازی، کنترل مقاوم و کنترل پیش بین خطی و غیرخطی را بررسی می کند.
واژگان کلیدی: سیستم تهویه مطبوع، استراتژی های کنترلی، بهینه سازی انرژی، سیستم هواساز.
مقدمه
برای حفظ شرایط مطلوب دما و رطوبت نسبی در آپارتمان ها، برج های مسکونی، مراکز جراحی، بیمارستان ها، مراکز دانشگاهی، مراکز نظامی، مراکز کشت سلول، فروشگاه های زنجیره ای مواد غذایی، کارخانجات تولیدکننده محصولات شیمیایی و غذایی، سوله های صنعتی، پالایشگاه ها و نیروگاه های اتمی سیستمهای گرمایش، تهویه و تهویه مطبوع[۱] مورد نیاز است. ایده سیستم های تهویه مطبوع برای اولین بار توسط ویلیس هاویلند کریر در سال ۱۹۰۶میلادی مطرح شد. کریر دستگاهی برای تصفیه هوا و کنترل رطوبت در کارخانجات نساجی جنوب آمریکا اختراع کرد که بسیار کارآمد بود. هدف اصلی واحد های HVAC با توجه به نظریه انجمن مهندسین گرمایش، تبرید و تهویه مطبوع آمریکا[۲]، تنظیم دما و رطوبت در داخل ساختمان ها می باشد. این واحد های HVAC با توجه به عملکرد دستگاه، شرایط اقلیمی و استراتژی های کنترلی در ساختمان به این صورت دسته بندی می گردند: چیلر هوا خنک[۳]، چیلر آب خنک[۴]، مینی چیلر[۵]، داکت اسپلیت[۶]، کندانسینگ یونیت[۷]، پکیج های پشت بامی[۸]، فن کوئل ها، کولر گازی ها، هواسازها[۹]. ذات غیرخطی و پیچیده بین متغیّرهای حالت و پارامترهای سیستم هواساز، چالشهای بسیاری را در طراحی سیستم کنترل (طراحی کنترل کننده و رویتگر) ایجاد می کند. بنابراین، ارائه یک استراتژی کنترلی موثر که بتواند با در نظر گرفتن تمام محدودیت های عملی موجود کارایی قابل قبولی داشته باشد، موضوعی چالش برانگیز در صنعت به شمار می رود. این تحقیق، به مرور استراتژی های کنترلی حوزه سیستم هواساز جهت کنترل دما و رطوبت می پردازد.
در دهه های اخیر، بهره برداری و بهینه سازی انرژی یک موضوع محبوب در ادبیات علمی و صنعتی می باشد. داده های عددی نشان می دهد که کشورهای توسعه یافته تا ۴۰% انرژی را در ساختمان ها مصرف می کنند و تقریباً نیمی از آن برای گرمایش، تهویه و تهویه مطبوع (سیستم های HVAC) استفاده می شود. این بدان معناست که امروزه تا ۲۰% درصد انرژی در ایالات متحده آمریکا برای سیستم های HVAC استفاده می گردد که در جدول (۱) نمایان می شود (Kelso, 2012).
جدول ۱: انرژی در ایالات متحده آمریکا، به ازای هر مصرف کننده در طول سال
| انرژی مصرف شده | ||
نوع مصرف/سال | ۲۰۰۶ | ۲۰۰۸ | ۲۰۱۱ |
گرمایش فضا (همه ساختمان ها) | ۲۰% | ۲۱% | ۳۷% |
سرمایش فضا (همه ساختمان ها) | ۱۳% | ۱۳% | ۱۰% |
گرمایش آّب (همه ساختمان ها) | ۱۰% | ۹% | ۱۲% |
روشنایی (همه ساختمان ها) | ۱۸% | ۱۳% | ۹% |
سیستم های HVAC (همه ساختمان ها) | ۳۳% | ۳۴% | ۴۷% |
چندین رویکرد برای کاهش انرژی و کارآمدتر کردن ساختمانها وجود دارد (Bearg, 2019):
۱- استفاده از مصالح مدرن در ساختمان ها با ویژگی های حرارتی مناسب تر.
۲- به کارگیری روش های طراحی (ساختمان و دستگاه( و در نظرگرفتن بهره وری انرژی در مرحله اولیه طراحی.
۳- جایگزینی تجهیزات با دستگاه ها و لوازم با راندمان بالاتر.
۴- استفاده از انواع استراتژی های کنترلی و بهینه سازی.
اعمال برخی از این موارد بسیار پرهزینه و مشکل است. در عین حال، این تکنیک های کنترلی باید بتوانند احساس آسایش برای ساکنین ایجاد کنند. تمرکز این مقاله، مروری بر برخی از تحقیقاتی از استراتژی های کنترلی هواساز در سیستم HVAC می باشد.
در ادامه بخش های مختلف این مقاله به صورت زیر بیان خواهد شد. بخش روش تحقیق به توصیف سیستم هواساز، معرفی اجزای تشکیل دهنده، انواع هواساز، معادلات دینامیکی و نقطه تعادل آن می پردازد. تکنیک ها و استراتژی های کنترلی پیاده سازی شده در بخش یافته ها بررسی می شود. نتیجه گیری و گام های پیشنهادی در بخش پایانی ارائه خواهد شد.
روش تحقیق
معرفی سیستم هواساز
هواساز ها یکی از اجزای اصلی سیکل تبرید[۱۰] هستند که میتواند هم در مسیر انواع چیلرها و بویلرها قرار گیرند و یا به تنهایی استفاده شوند. هواسازها از جعبه های فلزی به هم متصل شده تشکیل شده اند که دما و رطوبت مطلوب را با توجه به سیگنال های ارسالی از کنترلکننده و فیدبک های دریافتی از تجهیزات سطح فیلد، اهداف کنترلی را برآورده می کنند. این دستگاه با توجه به سیستم کنترلی مناسب و گردش هوا/آب، دما و رطوبت را تنظیم و شرایط آسایش را برای ساکنین به وجود می آورند. هواساز ها می توانند همزمان چند وظیفه را اجرا کنند: ۱-ایجاد هوای پاک و تمیز با توجه به نوع فیلتراسیون ۲-ایجاد هوای سرد یا گرم ۳- ایجاد هوای مرطوب با استفاده از رطوبت زن ۴- ایجاد فشار مثبت یا منفی با توجه به محیط آزمایشگاهی. سیستم هواساز دارای تجهیزات مکانیکال و الکتریکال مختلفی می باشند که تجهیزات مکانیکال در شکل (۱) و تجهیزات الکتریکال در شکل (۲) نشان داده شده است. وظایف هر کدام از این اجزاء به شرح زیر می باشد (بوذری لیاوُلی، ۱۳۹۶):
تجهیزات مکانیکال سیستم هواساز
· فن یا بلوور[۱۱]: وظیفه دمندگی هوا به درون زون[۱۲] مورد نظر را به عهده دارد.
· کویل[۱۳]: سرمایش هوا می تواند ناشی از ورود آب سرد چیلر یا مبرد (کویل (DX[۱۴] و گرمایش نیز حاصل از آب گرم بویلر یا المنت های الکتریکی موجود در این کویلها باشد.
· فیلتر: بستر های فیلتر (مانند فیلتر هپا[۱۵]) باعث جلوگیری از ورود ذرات معلق شده و هوای تمیز ایجاد می کند.
· دمپر: دمپرها وظیفه کنترل حجم هوای ورودی را دارند. از انواع دمپر ها می توان به دمپر هوای رفت[۱۶]، دمپر هوای برگشت[۱۷] و دمپر هوای تازه[۱۸] اشاره کرد.

شکل۱: تجهیزات مکانیکال سیستم هواساز- (Siemens website, 2021)
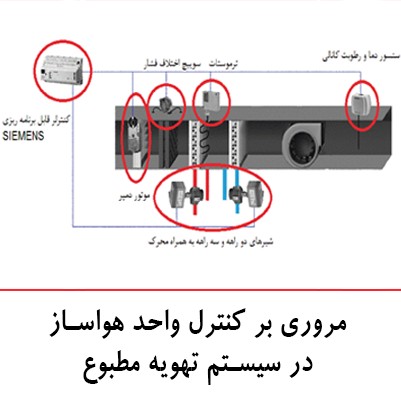
تجهیزات الکتریکال و کنترلی سیستم هواساز
· سنسور دما و رطوبت کانالی[۱۹]: مقدار دما و رطوبت کانال هوای برگشت به صورت سیگنال آنالوگ ۰-۱۰ ولت،۴-۲۰ میلیآمپر، مقاومتی PTCیا NTC توسط DTHS اندازهگیری می شود.
· ترموستات یا آنتی فریز: برای جلوگیری از ایجاد یخ زدگی آب در قسمت خروجی مبدل حرارتی اواپراتور[۲۰] آنتی فریز قرار می دهند.
· سوییچ اختلاف فشار[۲۱]: جهت اندازهگیری اختلاف فشار ناشی از کثیفی در دو سمت فیلتر و وضعیت کارکرد فن هواساز، سوییچ اختلاف فشار استفاده می شود که نحوه عملکرد و رنج آن برای فیلتر و فن متفاوت است.
· اکچویتور موتور دمپر[۲۲]: وظیفه اصلی موتور دمپر، باز و بسته کردن دمپر و بهینه سازی انرژی است. از انواع آن می توان به موتور دمپر دو وضعیتی با فنر برگشت به صورت ON/OFF، موتور دمپر سه وضعیتی[۲۳]، موتور دمپر تدریجی[۲۴] به صورت سیگنال آنالوگ ۰-۱۰ ولت و سیگنال ۴-۲۰ میلیآمپر اشاره کرد.
· اکچویتور شیر دوراهه/سه راهه[۲۵]: شیرهای موتوری برای مخلوط کردن و کنترل حجم دبی سیال های دو مسیر متفاوت در یک سیستم حرارتی یا برودتی با اکچویتور توسط سیگنال آنالوگ ۰-۱۰ ولت و سیگنال ۴-۲۰ میلیآمپر استفاده می شود.
· کنترل کننده قابل برنامه ریزی[۲۶]: چنانچه هر کدام از این تجهیزات کنترلی از نقطه تنظیم[۲۷]خود فاصله بگیرند، سیستم کنترل مرکزی PLC خطاهایی بر روی صفحه نمایش[۲۸]در اتاق مانیتورینگ برای اپراتور نشان می دهد.

شکل۲: تجهیزات الکتریکال و کنترلی سیستم هواساز- (Siemens website, 2021)
انواع سیستم های هواساز
هواسازها با توجه به ساختار از نظر نوع فن، داشتن یا نداشتن تجهیزات تنظیم کننده رطوبت، جنس بدنه، نوع کویل آبی یا کویل DX ، شرایط آب و هوایی و نوع کاربری به دسته های زیر تقسیم می شود (بوذری لیاوُلی، ۱۳۹۶).
هواسازهای حجم هوای ثابت[۲۹]: این سیستم ها بر پایه حجم هوای ثابت و درجه حرارت متغیّر عمل میکنند. در این سیستم ها جهت جبران بارهای حرارتی و برودتی فضای مورد نظر، حجم هوای ورودی به فضا ثابت است و به آن اصطلاحاً سیستم تهویه حجم هوای ثابت CAV گفته می شود.
هواسازهای حجم هوای متغیّر[۳۰]: در این سیستم ها جهت جبران بارهای حرارتی و برودتی فضای مورد نظر، حجم هوای ورودی به آن فضا بر خلاف سیستم های حجم هوای ثابت، توسط اینورتر[۳۱]متغیّر می باشد. در هواساز VAV به علت استفاده از فن های VSD در مصرف انرژی صرفه جویی می شود. این سیستم اصطلاحاً حجم هوای متغیّر VAVمی نامند.
هواسازهای بهداشتی[۳۲]: این هواسازها شبیه هواسازهای صنعتی هستند با این تفاوت که تعداد بسترهای فیلتر آن بیشتر بوده و با توجه به کاربرد خاص آن که در صنایع بهداشتی و بیمارستانی از لامپ گندزدایی استفاده می شود. فن استفاده شده در این هواسازها از نوع فن های سانتریفیوژی است که برای ایجاد فشار مثبت در اتاق تمیز به کار میرود.
هواسازهای هیت ریکاوری[۳۳]: این هواسازها به جای تخلیه هوای خروجی از ساختمان در فضای آزاد، از انرژی آن به عنوان مرحله پیشگرمایش یا پیش سرمایش هوای تازه ورودی استفاده شده و از هدر رفتن انرژی جلوگیری به عمل می آید. استفاده از این هواسازها در صنعت موجب شده تا ظرفیت کویل های سرمایشی و گرمایشی کاهش یافته، چیلر و بویلر با ظرفیت پایین تر انتخاب شده، و در نتیجه کاهش هزینه، کاهش بار حرارتی و صرفه جویی در انرژی را به همراه دارد.
شکل (۳) یک هواساز با حجم هوای متغیّر را نشان می دهد که تمام اجزای مکانیکال و الکتریکال بر روی آن نصب شده است.

شکل۳: هواساز با حجم هوای متغیّر VAV سری 39CP شرکت کریر آمریکا– (Carrier website, 2021)
معادلات دینامیکی سیستم هواساز
در این بخش برای فرموله بندی و مدلسازی دستگاه AHU ، ابتدا به بیان فرضیات مسئله میپردازیم. برخی از این فرضیات به صورت زیر درنظر گرفته می شود (بوذری لیاوُلی، ۱۳۹۶):
· واحد هواساز برای عملیات سرمایش در تابستان طراحی گردیده که در آن کویل آب سرد تعبیه شده است.
· هوا هیچ گونه نشتی ندارد (به جز در دریچههای اگزاست[۳۴]).
· جریان هوا همگن بوده و پارامترهای فیزیکی واحد هواساز حول مقدار نامی خود تغییر میکنند.
· گازها ایدهآل هستند و به طور کامل ترکیب شده اند.
با این فرضیات، و با استفاده از قوانین ترمودینامیک، حرارت و انتقال جرم، مدل دینامیکی هواساز به صورت رابطه (۱) نوشته میشود:
(۱) |
|

که در
آن![]() به ترتیب دمای فضای داخلی، دمای هوای کانال رفت و نسبت رطوبت داخلی و
به ترتیب دمای فضای داخلی، دمای هوای کانال رفت و نسبت رطوبت داخلی و ![]() آهنگ
جریان هوا و آب سرد هستند. پارامترها و مقادیر آنها در جدول (۲) تعریف شده است (Moradi
et al, 2011).
آهنگ
جریان هوا و آب سرد هستند. پارامترها و مقادیر آنها در جدول (۲) تعریف شده است (Moradi
et al, 2011).
جدول ۲: پارامترهای ترمودینامیکی واحد هواساز در سیستم تهویه مطبوع
نام پارامتر | توضیحات | مقدار | واحد |
| نسبت رطوبت محیط | ۰.۰۰۸۲ |
|
| نسبت رطوبت هوای رفت | ۰.۰۰۸۰ |
|
| نسبت رطوبت فضای داخل (ناحیه) | ۰.۰۰۸۰۴ |
|
| دمای محیط | ۳۲ |
|
| دمای هوای رفت | ۱۸ |
|
| دمای فضای داخل (ناحیه) | ۲۰ |
|
| تغییرات دما در واحد سرمایش | ۶ |
|
| توان منبع رطوبت (بار رطوبتی) | ۰.۰۰۰۱۲۲ |
|
| بار حرارتی | ۲۱۵۰۰ |
|
| آهنگ نرخ جریان هوا | ۲.۶ |
|
| آهنگ نرخ جریان آب سرد | ۰.۹۲۰۳ |
|
| گرمای ویژه هوا | ۱۰۰۰ |
|
| گرمای ویژه آب | ۴۱۸۰ |
|
| آنتالپی اشباع آب | ۸۰ |
|
| آنتالپی تبخیر | ۲۵۰۰ |
|
| چگالی جرمی هوا | ۱.۱۸ |
|
| چگالی جرمی آب | ۱۰۰۰ |
|
| حجم واحد سرمایش | ۱ |
|
| حجم فضای داخل (ناحیه) | ۴۰۰ |
|
برای نوشتن فرم فضای حالت، تعاریف زیر در نظرگرفته می شود:
|

با توجه به تعاریف بالا، رابطه (۱) به صورت رابطه (۲) بازنویسی میشود:
(۲) |
|

در نهایت فرم نمایش فضای حالت سیستم هواساز به شکل رابطه (۳) قابل بیان است:
(۳) |
|
که در آن ![]() بردار
حالت،
بردار
حالت،![]() بردار
ورودی های کنترلی و توابع غیرخطی
بردار
ورودی های کنترلی و توابع غیرخطی![]() و
و![]() به صورت
زیر خواهند بود:
به صورت
زیر خواهند بود:
(۴) |
|

(۵) |
|

نقطه تعادل سیستم هواساز
برای به دست آوردن نقطه تعادل سیستم AHU باید معادلات ![]() را حل کرد. با توجه به اینکه این معادلات
غیرخطی و پیچیده هستند، از تابع بهینهسازی مقیّد fmincon که از
دستورات نرمافزار MATLAB است بهره برده شده و نقطه
تعادل به صورت
را حل کرد. با توجه به اینکه این معادلات
غیرخطی و پیچیده هستند، از تابع بهینهسازی مقیّد fmincon که از
دستورات نرمافزار MATLAB است بهره برده شده و نقطه
تعادل به صورت ![]() به دست
می آید. با توجه به اینکه تمام کنترل کننده های غیرخطی طراحی شده با فرض نقطه
تعادل صفر می باشد، از این رو، با تغییر
متغیّر حول نقطه تعادل به صورت
به دست
می آید. با توجه به اینکه تمام کنترل کننده های غیرخطی طراحی شده با فرض نقطه
تعادل صفر می باشد، از این رو، با تغییر
متغیّر حول نقطه تعادل به صورت![]() رابطه
(۲) به رابطه (۶) تبدیل میشود که دارای نقطه تعادل صفر است.
رابطه
(۲) به رابطه (۶) تبدیل میشود که دارای نقطه تعادل صفر است.
(۶) |
|

که در آن
|

با
جایگذاری پارامترها و نقطه تعادل نتیجه میشود ![]() .
بنابراین فرم کلی فضای حالت جدید به صورت رابطه (۶) نوشته میشود که در آن
.
بنابراین فرم کلی فضای حالت جدید به صورت رابطه (۶) نوشته میشود که در آن![]() بردار متغیّرهای حالت و
بردار متغیّرهای حالت و![]() بردار ورودی بوده و تابع غیرخطی
بردار ورودی بوده و تابع غیرخطی![]() به صورت زیر بیان می گردد:
به صورت زیر بیان می گردد:
(۷) |
|

یافته ها
این بخش به مرور استراتژی های کنترلی می پردازد که در چند سال اخیر در مقالات علمی مهندسی برق، مکانیک و انرژی در حوزه تهویه مطبوع بر روی سیستم AHU مورد توجه بسیاری قرار گرفته شده است. به طور خلاصه، رویکرد های کنترلی شبیه سازی شده بر روی سیستم هواساز به صورت روش های زیر تقسیم بندی می شود:
· استراتژی های مبتنی بر کنترل بهینه و بهینه سازی[۳۵]
· استراتژی های مبتنی بر کنترل مقاوم[۳۶]
· استراتژی های مبتنی بر کنترل پیش بین خطی و غیرخطی[۳۷]
استراتژی های مبتنی بر کنترل بهینه و بهینه سازی
روش معادله ریکاتی وابسته به حالت[۳۸] برای کنترل بهینه غیرخطی سیستم AHU پیشنهاد شده است. در رویکرد SDRE، با استفاده از نمایش شبه خطی سازی[۳۹] و حفظ تمامی ویژگی های غیرخطی سیستم، قانون کنترل بهینه برای پایداری و ردیابی مسیرهای مرجع دما و رطوبت به دست می آید. علاوه بر این، رویکرد SDRE میتواند مصرف انرژی تابع هزینه را به حداقل برساند. نتایج شبیه سازی عملکرد مناسب روش SDRE را در ردیابی مسیرهای مرجع علیرغم تغییر نقطه تعادل در مقایسه با تنظیمکننده درجه دوم خطی[۴۰] نشان می دهد (Bouzari-Liavoli and Fakharian, 2017). کنترلکننده زیربهینه SDRE برای یک واحد هواساز AHU بر اساس رویتگر SDRE ارائه شد. رویکرد SDRE روش کنترل فیدبک حالت است. با توجه به اینکه تمام حالت های مدل AHU برای اندازه گیری در دسترس نیستند، از این رو رویکرد مبتنی بر رویتگر SDRE برای تخمین حالت ها استفاده می شود. در این تحقیق، از یک نمایش شبه خطی برای طراحی کنترل کننده و رویتگر استفاده شده است. نتایج شبیه سازی، تخمین مناسب روش SDRE را در مقابل رویتگر فیلتر کالمن[۴۱] توسعه یافته به تصویر می کشد (Bouzari-Liavoli and Fakharian, 2019). در دو تحقیق بالا، اثر اغتشاش پله در اکچویتورهای هواساز که پس از مدتی به دلیل استهلاک دچار مختل می شوند، بررسی نشده است. در این مقاله ها، رویتگر SDRE و رویتگر EKF با کنترل کننده SDRE برای از بین بردن این اغتشاش پله پیشنهاد شده است. به دلیل اغتشاش پله که در ردیابی سیگنال مرجع وجود دارد، خروجی های سیستم هواسـاز از مسیر مرجع خود منحرف شده اند. با توجه به اینکه معادله ریکاتـی وابسـته به حالـت در ذات
خود مقاوم است، دما و رطوبت مجدداً می توانند مسیرهای مطلوب را ردیابی کند. زیرا SDRE می تواند اثر اغتشاش را کاهش دهد. نهایتاً، نتایج با نسخه خطی SDRE یعنی LQR مقایسه گردید (بوذری لیاوُلی، ۱۴۰۰) و (بوذری لیاوُلی، ۱۴۰۱). فرم نمایش شبه خطی در رویکرد SDRE یکتا نیست و بی نهایت فرم نمایش شبه خطی وجود دارد. در این تحقیق، دو فرم نمایش شبه خطی به روش های متفاوت پیشنهاد شده است. فرم شبه خطی نوع اول علاوه بر ردیابی بهینه مسیرهای مرجع دما و رطوبت، قادر است مصرف انرژی را نیز حداقل نماید. در صورتی که در فرم نمایش شبه خطی نوع دوم، سیستم افزونه شده، و رتبه ماتریس کنترل پذیری کاهش می یابد. نتایج شبیه سازی، عملکرد مناسب فرم شبه خطی نوع اول را در ردیابی مسیرهای مرجع دما و رطوبت با وجود تغییر نقطه کار نشان می دهد. نتیجه این مقاله بیان می کند، از بی نهایت فرم شبه خطی، فقط برخی از آنها می تواند بهینه باشند و سایر فرم های شبه خطی پاسخ زیربهینه را ارائه می دهند (بوذری لیاوُلی، ۱۴۰۰).
استراتژی های مبتنی بر کنترل مقاوم
در این مقاله، یک مدل چند ورودی و چند خروجی غیرخطی با خطیسازی معادلات حالت در اطراف نقاط تعادل با رویکرد کنترلر مقاوم ∞H در نظر گرفته شده است. در این تحقیق، مسیرهای مرجع دما و رطوبت ترکیبی شیب-پله فرض می شود. با توجه به نتایج شبیه سازی، کنترلکننده مقاوم ∞H کارایی مقاوم[۴۲] سیستم هواساز را در ردیابی مسیرهای مرجع تضمین میکند. در حالی که، استفاده از کنترلکننده ساده مانند جایابی قطب[۴۳] منجر به رفتار نوسانی بالای متغیّرهای خروجی و سیگنال های کنترلی میشود. همچنین، استفاده از کنترل کننده مقاوم ∞H نیاز به مصرف انرژی کمتری در مقایسه با کنترل کننده جایابی قطب دارد(Moradi et al, 2012) . در این تحقیق، رویتگرهای حداقل-مرتبه[۴۴] و مرتبه-کامل[۴۵] در کنترل مقاوم سیستم هواساز در حضور عدم قطعیت پارامترهای مدل نامی برای تخمین دمای داخل زون و رطوبت نسبی در نظر گرفته شده است. رویتگر حداقل-مرتبه زمانی طراحی می شود که یک یا دو حالت در دسترس باشد. نتایج شبیه سازی نشان می دهد وقتی از یک رویتگر حداقل-مرتبه با دو سنسور استفاده میشود، ورودیهای کنترل کمتری مورد نیاز است و همچنین کارایی مقاوم مناسب تر را نسبت به رویتگر مرتبه-کامل دارد (Setayesh et al, 2015). تکنیک مقاوم ∞H بهینه خطی بر اساس الگوریتم μ̃-DKiteration بر روی مدل غیرخطی AHUپیادهسازی شده است. این مدل غیرخطی بر خلاف مدل های قبلی دارای چهار حالت می باشد و در آن برای بررسی اثر دی اکسید کربن CO2 از سنسور کیفیت هوا[۴۶] نیز استفاده شده است. سپس، نتایج با رویکرد کنترل حالت لغزشی[۴۷] غیرخطی مقایسه گردید. با توجه به نتایج شبیه سازی، عملکرد مقاوم، کنترلکننده SMC بهتر از ∞H مقاوم خطی بهینه است (Setayesh et al, 2019). در این تحقیق، یک کنترل کننده SMC برای هواساز با سه حالت و دو ورودی/خروجی با وجود عدم قطعیت در پارامترها پیشنهاد شده است. هر دو خروجی سیستم توسط یک ورودی کنترل می شوند در حالی که خروجی سوم تحت تأثیر دو ورودی قرار می گیرد. این مشکل و پیچیدگی های مبهم در ماهیت غیرخطی AHU چالش های مختلفی را برای کنترل ایجاد می کند. سطح لغزش جدیدی در این مقاله ارائه میشود و تئوری لیاپانوف برای تأیید پایداری مجانبی سیستم حلقه بسته به اثبات می رسد. نتایج عددی نشاندهنده ردیابی مناسب مسیرهای مرجع متغیّر با زمان با وجود تغییرات در پارامترهای مدل است. در رویکرد SMC مقاوم برای از بین بردن پدیده چترینگ[۴۸]، تابع اشباع[۴۹] پیشنهاد شده است (Bouzari-Liavoli et al, 2022).
استراتژی های مبتنی بر کنترل پیش بین خطی و غیرخطی
این مقاله رویکرد اتورگرسیو میانگین متحرک با ورودی خارجی[۵۰] ARMAX و مدل MPC را برای بهبود کارایی انرژی در سیستم HVAC ارائه می دهد. کنترل کننده MPC می تواند مسیرهای مرجع دما و رطوبت را با توجه به محدودیت های بار حرارتی در VAV های سطح پایین تر تنظیم کند. در این مقاله، تمام پردازش داده ها، اعتبارسنجی مدل و اجرای الگوریتم کنترل بر اساس اندازه گیری های گسترده جمع آوری شده از یک ساختمان اداری در محوطه دانشگاه کالیفرنیا، Merced می باشد (Liang et al, 2015). در این مقاله، یک کنترلکننده پیشبینی مدل غیرخطی چند متغیّره بر اساس الگوریتم fmincon برای AHU در یکVAV مطرح شده است. ساختار تکنیک NMPC بر بهینه سازی تکراری (آنلاین) یک تابع هزینه با افق محدود کارایی عملیاتی و استفاده از رفتار آینده هواساز برای تولید سیگنال کنترلی بدون در نظر گرفتن خطای گذشته متمرکز است. نتایج شبیه سازی نشان دهنده کارایی مناسب رویکرد NMPC در تخمین و ردیابی نقطه تنظیم مورد نظر در مقایسه با LQR است (Bouzari-Liavoli et al, 2021). در این مقاله، یک استراتژی کنترل پیشبینی مدل غیرخطی برای یک مدل کامل چیلر به همراه هواساز پیشنهاد شده است. کنترل کننده MPC ورودی های بهینه را برای سیستم تولید می کند، که حداقل مصرف برق کل را میتوان با هماهنگی بهینه عملکرد فنها، پمپها و چیلر به شرط حفظ دمای اتاق به خوبی به دست آورد. استراتژی پیشنهادی در مورد صرفه جویی در انرژی و مورد کاهش هزینه ارزیابی می شود، ۶.۲٪ صرفه جویی در مصرف برق کل و ۱۲.۳٪ کاهش قبض برق در مقایسه با کنترل کننده PI سنتی به دست می آید. نتایج شبیه سازی اثربخشی استراتژی پیشنهادی را تایید می کند (Wang et al, ۲۰۲۲).
نتیجه گیری
در این مقاله برخی از استراتژی های کنترلی بر روی سیستم هواساز برای تنظیم دما و رطوبت بررسی شد. با توجه به این مطالعه، رویکردهای ارائه شده متناسب با اهداف کنترلی در سیستم تهویه مطبوع بوده است. این نتیجه گیری حاصل می شود که استفاده از کنترل کننده های غیرخطی مانند کنترل کننده SDRE، SMCو NMPC می تواند پاسخ مناسب تری برای ردیابی مسیرهای مرجع داشته باشد و همچنین مصرف انرژی را نیز کاهش می دهد.
از گام های بعدی می توان به ترکیب این استراتژی ها با انواع رویکرد های هوشمند مانند کنترل فازی و عصبی اشاره کرد.
منابع
۱. Kelso, J. D., (2012). Building Energy Data Book 2011. U.S. Department of Energy.
۲. Bearg, D.W., (2019). Indoor air quality and HVAC systems. Routledge.
۳. بوذری لیاوُلی، فریبا. ۱۳۹۶. کنترل بهینه غیرخطی هواساز با روش معادله ریکاتی وابسته به حالت. پایان نامه کارشناسی ارشد. گروه مهندسی برق. دانشکده مهندسی برق، پزشکی و مکاترونیک. دانشگاه آزاد اسلامی واحد قزوین.
۴. https://hit.sbt.siemens.com/RWD/app.aspx
۵. https://en.ahi-carrier.gr/product/39cp-airovision-air-handling-unit/
۶. Moradi, H., Saffar-Avval, M., & Bakhtiari-Nejad, F. (2011). Nonlinear multivariable control and performance analysis of an air-handling unit. Energy and Buildings, ۴۳(۴), ۸۰۵-۸۱۳.
۷. Bouzari-Liavoli, F., and Fakharian A. (2017). Nonlinear optimal control of air handling unit via state dependent riccati equation approach. International Conference on Control, Instrumentation, and Automation (ICCIA). IEEE. ۱۳۸–۱۴۳.
۸. Bouzari-Liavoli, F., and Fakharian A. (2019). Sub-optimal observer-based controller design using the state dependent riccati equation approach for air-handling unit. Iranian Conference on Electrical Engineering (ICEE). IEEE. ۹۹۱–۹۹۶.
۹. بوذری لیاوُلی، ف.، (۱۴۰۰)، "طراحی کنترل کننده معادله ریکاتی وابسته به حالت مبتنی بر رویتگر فیلتر کالمن توسعه یافته در حضور اغتشاش پله برای یک واحد هواساز در سیستم تهویه مطبوع،"هفتمین کفرانس بین المللی دانش و فناوری مهندسی مکانیک، برق، کامپیوتر ایران، تهران، ۲۵ اسفند، ۱-۱۴.
۱۰. بوذری لیاوُلی، ف.، (۱۴۰۱)، "ردیابی دما و رطوبت برای یک واحد هواساز در حضور اغتشاش پله در اکچویتورها: کنترل کننده و رویتگر بهینه غیرخطی معادله ریکاتی وابسته به حالت،" نخستین کنفرانس ملی فناوری های نوین در مهندسی مکانیک و سازه، دانشگاه پیام نور استان فارس، واحد شیراز، ۱۹ خرداد، ۱-۱۷.
۱۱. بوذری لیاوُلی، ف.، (۱۴۰۰)، "بررسی دو فرم متفاوت نمایش شبه خطی جهت کنترل دما و رطوبت برای یک واحد هواساز در سیستم تهویه مطبوع: رویکرد زیربهینه معادله ریکاتی وابسته به حالت ،" اولین کنفرانس بین المللی مکانیک، صنایع، ساخت و مواد، کپنهاگن، دانمارک، ۱۸ اسفند، ۱-۱۲.
۱۲. Moradi, H., Bakhtiari-Nejad, F., & Saffar-Avval, M. (2012). Multivariable robust control of an air-handling unit: A comparison between pole-placement and H∞ controllers. Energy Conversion and Management, 55, 136-148.
۱۳. Setayesh, H., Moradi, H., & Alasty, A. (2015). A comparison between the minimum-order & full-order observers in robust control of the air handling units in the presence of uncertainty. Energy and Buildings, 91, 115-130.
۱۴. Setayesh, H., Moradi, H., & Alasty, A. (2019). Nonlinear robust control of air handling units to improve the indoor air quality & CO2 concentration: A comparison between H∞ & decoupled sliding mode controls. Applied Thermal Engineering, 160, ۱۱۳۹۵۸.
۱۵. Bouzari-Liavoli, F., Shadi, R. & Fakharian, A. (2022). Multivariable Nonlinear Control of Air-Handling Unit in HVAC System: Robust Sliding Mode Control. International Conference on Control, Instrumentation, and Automation (ICCIA). IEEE. ۱-۶.
۱۶. Liang, W., Quinte, R., Jia, X., & Sun, J. Q. (2015). MPC control for improving energy efficiency of a building air handler for multi-zone VAVs. Building and Environment, 92, ۲۵۶-۲۶۸.
۱۷. Bouzari-Liavoli, F., Shadi, R., & Fakharian, A. (2021). Multivariable Nonlinear Model Predictive Controller Design for Air-Handling Unit with Single Zone in Variable Air Volume. International Conference on Control, Instrumentation and Automation (ICCIA). IEEE. ۱-۶.
۱۸. Wang, W., Zhou, Q., Pan, C., & Cao, F. (2022). Energy-efficient operation of a complete Chiller-air handing unit system via model predictive control. Applied Thermal Engineering, ۲۰۱, ۱۱۷۸۰۹.
[۱] Heating, Ventilating and Air-Conditioning (HVAC)
[۲] American Society of Heating, Refrigerating and Air-Conditioning Engineers (ASHRAE)
[۳] Air-Cooled Chiller
[۴] Water-Cooled Chiller
[۵] Mini Chiller
[۶] Duct Split
[۷] Condensing Unit
[۸] Package Rooftop Unit
[۹] Air-Handling Unit (AHU)
[۱۰] Refrigeration Cycle
[۱۱] Blower
[۱۲] Zone
[۱۳] Coil
[۱۴] Direct Expansion Coil
[۱۵] HEPA Filter
[۱۶] Supply Air Damper
[۱۷] Return Air Damper
[۱۸] Fresh Air Damper
[۱۹] Duct Temperature and Humidity Sensor (DTHS)
[۲۰] Evaporator
[۲۱] Differential Pressure Switch (DPS)
[۲۲] Motorized Damper Actuator
[۲۳] Three Position Motorized Damper
[۲۴] Proportional Motorized Damper
[۲۵] Two/Three Way Valve Actuator
[۲۶] Programmable Logic Controller (PLC)
[۲۷] Set-Point
[۲۸] Human Machine Interface (HMI)
[۲۹] Constant Air Volume (CAV)
[۳۰] Variable Air Volume (VAV)
[۳۱] Variable Speed Drive (VSD)
[۳۲] Hygienic Air–Handling Unit
[۳۳] Heat Recovery Air–Handling Unit
[۳۴] Exhaust
[۳۵] Strategies based on Optimal Control and Optimization
[۳۶] Strategies based on Robust Control
[۳۷] Strategies based on Linear and Nonlinear Model Predictive Controller (MPC)
[۳۸] State-Dependent Riccati Equation (SDRE)
[۳۹] Pseudo-Linearization Presentation
[۴۰] Linear Quadratic Regulator (LQR)
[۴۱] Extended Kalman Filter (EKF)
[۴۲] Robust Performance
[۴۳] Pole Placement
[۴۴] Minimum-Order Observer
[۴۵] Full–Order Observer
[۴۶] Air Quality Sensor
[۴۷] Sliding Mode Control (SMC)
[۴۸] Chattering Phenomenon
[۴۹] Saturation Function
[۵۰] Autoregressive Moving Average with Exogenous Input (ARMAX)